

Bu, birçok geliştirilmiş özelliğe sahip Recyclebot v2.2'nin tamamen otomatikleştirilmiş bir sürümüdür . Bazı özellikler şunlardır:
- Plastik türü tuş takımı arayüzünden seçilebiliyor ve kontrolör plastiğin ekstrüzyon sıcaklığını otomatik olarak güncelliyor.
- Eritilip ekstrüde edilebilen her türlü plastik için ekstrüzyon sıcaklığı tuş takımı arayüzünden de girilebilmektedir.
- Daha iyi proses izleme için LCD arayüz.
- Ekstrüzyon sıcaklığına ulaşılana kadar ekstrüzyon yapılmaz - mikrodenetleyici ile otomatik kontrol edilir, (manuel opsiyon).
- Triyak ve MOSFET kullanılarak düşük maliyetli güç kontrol seçenekleri.
Daha fazla bilgi: Christian Baechler, Matthew DeVuono ve Joshua M. Pearce, " Atık Polimerin RepRap Hammaddesine Dağıtılmış Geri Dönüşümü " Hızlı Prototipleme Dergisi, 19 (2), s. 118-125 (2013). açık erişim

İçindekiler
- 1 Parça listesi
- 2 Güç Hesaplamaları
- 3 Isıtma bölümü/Eritme bölgesi
- 4 Sıcaklık İzleme ve Proses Kontrolü
- 5 Nasıl Monte Edilir (Elektrik Bileşenleri)
- 6 Nasıl Monte Edilir (Mekanik Bileşenler)
- 7 Nasıl Test Edilir
- 8 Nasıl kullanılır
- 9 Sorun giderme
- 10 Gelecekteki Çalışmalar - Bunu daha iyi hale getirmek
- 11 Bazı yararlı referanslar ve harici bağlantılar
- 12 Ayrıca bakınız
Parça listesi
Ana mekanik bileşenler bir makine atölyesinde üretildi - ve bunların ayrıntılarına http://www.thingiverse.com/thing:12948 adresinden ulaşılabilir.
RecycleBot'un elektronik bileşenleri aşağıda bulunmaktadır.
Güç Hesaplamaları
İlk adım, plastiği eritmek ve ekstrüde etmek için gereken gücü seçmektir. RecycleBot v2.2 ve Recyclebot v2.3 için, ekstrüzyon hızı, ekstrüderin boyutu ve gereksinimler temelinde 440 W'lık maksimum güç seviyesi (Pmax) seçildi. Pmax'ın 440 W olarak seçilmesine rağmen, bu güç seviyesinin neredeyse hiç kullanılmadığı unutulmamalıdır; çünkü bu seviye, 500C'lik bir sıcaklığa neredeyse anında ulaşmak için yeterlidir, bu nedenle sistemin sınırlı sınırlar içinde kalması için çok yüksek güvenilirliğe sahip bir güç kontrol sistemi kullanılmalıdır. Bu maksimum güç seviyesinde, hemen hemen tüm plastik türleri anında buharlaşır. Sistem, tuş takımı arayüzünden beslenebilen veya seçilebilen 350 C'lik maksimum bir sıcaklığın çok altında çalışacak şekilde tasarlanmıştır.
Değişkenler ve sabitler
- Pmax: Maksimum güç
- n: ısıtma borusu bölümündeki dönüş sayısı
- d: ısıtma borusu bölümünün dış çapı
- Ω': Nikrom telin birim uzunluk başına direnci
- r: nikrom telin direnci
- L: nikrom telin uzunluğu
- V: ısıtma elemanına (nikrom) güç sağlamak için kullanılan potansiyel farkı = 110 V
- I: Isıtma elemanından (nikrom) geçen akım
P=V.BEN{\görüntüleme stili P=VI}

⇒BEN=P/V{\displaystyle \Rightarrow I=P/V}
P=BEN2.R{\displaystyle P=I2.r}

⇒R=P/BEN2{\displaystyle \Sağ ok r=P/I2}

R=Ω′.L{\displaystyle r=\Omega '.L}

⇒L=R/Ω′{\displaystyle \Rightarrow L=r/\Omega '}

Nikromun uzunluğu yukarıda belirtilen prosedüre göre hesaplanır. Çıplak ve yalıtılmış olmak üzere iki tip nikrom vardır. İzole edilmiş nikrom kullanılıyorsa, nikromun borunun metal ısıtma bölümüyle uzunluk boyunca temas halinde olduğundan emin olun, aksi takdirde nikrom ve metal arayüzü arasında küçük bir hava boşluğu bile yüksek yerelleştirilmiş sıcaklığı tetikleyecek ve nikrom duman çıkarmaya başlayacaktır. Bu nedenle, aşağıdaki resim galerisinde gösterildiği gibi yalıtımlı seramik boncuklara sahip çıplak nikrom tel kullanmak daha iyidir. Bu, daha yüksek güç ve daha yüksek sıcaklık çalışması kullanmamızı sağlar. Nikromun göstergesi, gerekli uzunluk, akım ve ısıtma için güç gereksinimleri temelinde seçilir. Bu amaçla, 18-26 AWG nikrom kullanılabilir. Düşük voltaj ve yüksek akım tabanlı kontrol için kalın nikrom önerilir ve yüksek voltaj (AC) ve düşük akım tabanlı kontrol için daha yüksek Ω' değerine sahip olduğundan ince nikrom önerilir.
Bu RecycleBot için, 350C mertebesinde maksimum sıcaklık elde etmek için seramik boncuklarla birlikte 26 AWG nikrom kullanıldı. Nikromun uzunluğu yaklaşık 10 feet olup 2.67 Ohm/feet dirence sahipti.
Isıtma bölümü/Eritme bölgesi
Isıtıcı en önemli bölüm olduğundan, daha iyi sonuçlar için hassas bir şekilde tasarlanmalı ve üretilmelidir, çünkü birkaç derecelik sıcaklık değişiklikleri ekstrüde plastiğin farklı mekanik özelliklerine yol açabilir. Isıtma bölümü için bir diğer önemli kriter, sıcaklığın namlu boyunca neredeyse sabit kalması ve ekstrüde plastiğin tekdüze olması için tekdüze bir ısıtma ortamı yaratmaktır. Bunu başarmak için, çıplak nikrom teli yalıtmak için yüksek sıcaklıklı seramik boncuklar kullanıldı ve böylece demir namludan elektriksel izolasyon sağlandı ve bu şemanın kullanılmasının bir avantajı, ortam ortamından yüksek kaliteli termal yalıtım sağlanması ve seramik boncukların alt tarafı metale sıkıca oturduğundan ve üst yüzey havaya yalıtıldığından demir namluya ısının verimli bir şekilde aktarılmasıdır, bu da daha sonra yalıtılır.
Isıtıcı bölümünün yapım adımları
- Namluyu temizleyin ve daha sonra üst yüzeyini törpüyle pürüzlendirin.
- Tekrar yüzeyi temizleyin ve kalan metal artıklarını ve tozu temizleyin.
- Nikrom telin istediğiniz uzunluktaki kısmını kesin ve düzeltip uçlarını bir kelepçeye takın.
- Seramik boncukları, tüm tel seramik boncuklarla kaplanana kadar tek tek dikkatlice nikrom telin üzerine yerleştirin.
- Fırın çimentosunu alın ve demir namlunun tüm yüzeyini kaplayın, tüm yüzeyin fırın çimentosuyla tamamen kaplandığından emin olunmalıdır, çünkü açıkta kalan çıplak metal, çıplak nikromla kısa devre yapma riskini taşıyabilir ve dolayısıyla elektrik çarpması olasılığını artırabilir (ve güç kaynağınızı yok edebilir).
- Nikrom teli yavaşça alıp namlunun üzerine yerleştirin ve sanki nikrom telden bobin yapıyormuş gibi namluyu yavaşça kapatın.
- Nikromun iki serbest ucunu bir kelepçeye sıkıca sabitleyin ve seramik boncukların tüm yüzeyini kaplayacak şekilde fırın çimentosu uygulayın ve galeride verilen resme benzemelidir. Tekrar vurgulanır ki, fırın çimentosu seramik boncukların tüm yüzeyini kaplayacak şekilde uygulanmalıdır, böylece alttaki metale güçlü bir şekilde yapışmalıdır ve ayrıca çıplak nikromun metale hiçbir yere temas etmemesi için bir elektrik yalıtım tabakası oluşturmalıdır.
- En az 24 saat kurumaya bırakın.
- Isıtıcıyı çalıştırmak için iki serbest ucu timsah klipsleriyle bağlayın.
Güvenlik notu Fırın çimentosu kullanırken eldiven kullanın çünkü alkalindir ve uzun süre maruz kalırsanız sizi yaralayabilir ve cildinize zarar verebilir, eğer cildiniz fırın çimentosuyla temas ederse, hemen akan su altında yıkayın. Eğer erişiminiz varsa bunu bir davlumbazda yapmanız önerilir.

Yalıtım için kullanılan seramik boncuklar

Elektrik ve ısı yalıtımında kullanılan fırın çimentosu

Nikromla sarılmış ve demir namlunun üzerine sarılmış ısıtıcı bölümü

Tüm yüzeye fırın uygulanmış ısıtıcı bölümü




Sıcaklık İzleme ve Proses Kontrolü
Plastik geri dönüşüm ve ekstrüzyonun sıcaklığını ve diğer ilgili süreçlerini verimli bir şekilde kontrol etmek ve aynı anda maliyeti düşürmek, özellikle ev uygulamaları için RecycleBot geliştirmenin temel zorluğudur. RecycleBot'u açık sürdürülebilirlik için tanıtmak amacıyla, tüm kontrol sistemi Arduino üzerinde çalışacak şekilde tasarlanmıştır . Arduino , çok popüler bir açık kaynaklı mikrodenetleyici tabanlı uygulama geliştirme platformudur. Kullanımı ve programlaması kolay ve mükemmel kullanıcı topluluğu desteğine sahip olan Arduino, RecycleBot için kontrol sistemi uygulamak için ideal olan düşük maliyetli hızlı prototipleme platformudur. Arduino Mega, LCD, tuş takımı ve diğer bileşenlerle arayüz oluşturmak için yeterli giriş/çıkış pinine sahip olan sistemi tasarlamak ve uygulamak için kullanılmıştır.
Tüm süreç iki bölüme ayrılmıştır
- Giriş modu
- Kontrol modu
Giriş modu
İşlem, kullanıcının plastik seçimi veya ekstrüzyon sıcaklığını girmesiyle başlar. 10 farklı plastik türü seçeneğiyle, kullanıcı geri dönüştürülecek istenen plastik türünü seçebilir ve program otomatik olarak o belirli plastik türü için çalışma/ekstrüzyon için optimum sıcaklık aralığını yükler. Alternatif olarak, kullanıcı ayrıca 350 o C'nin altında çalıştırılabilen herhangi bir plastik türü için ekstrüzyon sıcaklığını da girebilir. Ekstrüzyon sıcaklığı ayarlandıktan sonra, program kullanıcıdan sıcaklığı onaylamasını ister ve sıcaklık ayarlandıktan sonra program kontrol moduna geçer.
Kontrol modu
Kontrol modunda, mikrodenetleyici sıcaklığı giriş olarak alır ve ısıtıcının çıkış gücünü buna göre ayarlar, böylece sıcaklık ayarlanan ekstrüzyon sıcaklığının 15 o C üstünde ve altında olan ayarlanan sınır aralığında kalır. Sistem, herhangi bir şekilde sistem sıcaklığı ayarlanan ekstrüzyon sıcaklığını aşarsa, sistem sıcaklığı ayarlanan sınır aralığına gelene kadar ısıtıcının gücü tamamen kesilecek şekilde tasarlanmıştır. Ayrıca, sıcaklık ayarlanan aralıkta olduğunda, ekstrüzyon işlemi başlar, yani motor parçalanmış plastiği hazneden ısıtıcıya beslemeye başlar, ayrıca filamenti saran ve bir makaraya saran makaralı adım motoru çalışır. Sıcaklık ekstrüzyon sıcaklığının 15 o C altına düşerse, program filamentin kalitesinin aynı kalmasını sağlamak için besleyici motoru ve makaralı motoru durdurur ve sistem sıcaklığı ayarlanan çalışma aralığına ulaşır ulaşmaz hem besleyici hem de makaralı motor çalışmaya devam eder.
Program kodu
RecycleBot için kod, tuş takımı, LCD ve adım motoru kütüphaneleri kullanılarak Arduino IDE üzerinde C dilinde Ankit Vora tarafından yazılmıştır . RecycleBot kodunu bir Arduino Mega üzerinde çoğaltmak için, öncelikle tüm kütüphaneler Arduino klasörünün doğru hedefine kopyalanmalıdır, böylece Arduino derleyicisi bunları program koduyla birlikte derleyebilir. Arduino geliştirme platformunda LCD kütüphanesi zaten dahildir, ancak tuş takımı ve adım motoru kütüphanesinin kod derlenmeden önce kaydedilmesi gerekir.
Arduino Mega'da program kodunu çoğaltma, derleme ve yükleme adımları
- Kütüphaneleri indirin, sıkıştırılmış dosyaları açın ve her klasörü tam olarak şu klasöre kopyalayın: arduino-1.0\libraries\
(Eğer yeni bir Arduino versiyonu kullanıyorsanız tüm kütüphaneleri o klasöre kopyalayın, zaten Arduino geliştirme platformunun klasöründe 'libraries' klasörü olacak ve kullanılan her kütüphane bu klasöre kopyalanmalıdır.
- Arduino geliştirme platformunu çalıştırın, 'taslak' sekmesine gidin, sonra 'kütüphaneyi içe aktar...' bölümüne gidin, listede Keypad ve AFMotor'u bulmalısınız. Eğer görünürlerse, bu her şeyin tamamlandığı ve kodu kullanmaya hazır olduğumuz anlamına gelir.
- RecycleBot ve spooler için kodu indirin. RecycleBot kodunu Arduino IDE'ye kopyalayın veya dosyayı Arduino ile açın ve ardından kart listesinden Arduino Mega'yı seçin ve yükleyin. RecycleBot kodu artık yürütülmeye hazır. Spooler için, kodu dosyadan kopyalayın veya Arduino ile spooler kodu için dosyayı açın, kart olarak Arduino Uno'yu seçin ve yükleyin, spooler çalışmaya hazırdır.
Program kodu bağlantısı [1]
Dosyaları veya bozuk bağlantıyı bulamazsanız lütfen bana avora#mtu.edu adresinden e-posta gönderin (# işaretini @ ile değiştirin, anti-spam)
RecycleBot Devresi
Devre şemasını indirin ve daha iyi güvenilirlik elde etmek için iki ayrı PCB üzerinde üretin. Birisi devre tahtası kullanabilir, ancak devre tahtaları kullanmak bazen sarkan kablolar nedeniyle güvenilirlik sorunları yaratır ve özellikle düşük güç DC kontrol ve izleme bileşenleriyle yüksek güç kontrol elemanları kullandığımızda, hızlı prototipleme için devreyi genel amaçlı PCB üzerinde yapmak daha iyidir ve önerilir. Sıcaklık sensörü ve ölçüm devresinin bir PCB üzerinde, DC motor ve ısıtıcı kontrol cihazının ise başka bir PCB üzerinde yapılması önerilir. Sıcaklık sensörü devresi küçüktür ve +5 V'luk düşük voltajda çalışır ve AC bileşenleri için iyi bir izolasyona ihtiyaç duyar ve resim galerisinde gösterildiği gibi ayrı bir PCB üzerinde üretilmelidir. Ve DC motor kontrolü ve ısıtıcı kontrol cihazı devresi hem +5 V, +12 V hem de 110 V AC kullanır, bu nedenle Arduino vb. gibi düşük voltajlı DC bileşenlerinden iyi bir şekilde izole edilmelidir, böylece geçişler, ani yükselmeler sıcaklık ve proses kontrolünün çalışmasını etkilemez, bu nedenle ayrı bir PCB üzerinde de üretilmelidir. Hem yüksek güce hem de sıcaklığa dayanabilmesi için ısıtıcı güç kontrol cihazı için iyi kaliteli bakır tel kullanın.
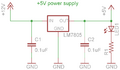
Güç Kaynağı Devresi

Termokupl bazlı sıcaklık sensörü

Arduino Mega 2560 tabanlı kontrol sistemi

Isıtıcı ve Motor Kontrolörü

Biriktirici denetleyicisi





Devre Nasıl Çalışır?
RecycleBot v.2.3, kullanımı kolay giriş/çıkış arayüzüne sahip tam otomatik bir proses kontrol sistemidir.
Giriş bileşenleri şunları oluşturur:
- Klavye
- Sıcaklık sensörü
Çıktı bileşenleri şunları oluşturur:
- LCD
- Motor kontrolörü MOSFET
- Triyak kontrolü
- Biriktirici
Arduino'nun güç verildiğinde yaptığı ilk şey bir karşılama mesajı görüntülemektir. Bundan sonra bir while döngüsüne girer ve kullanıcı tuş takımından geçerli bir '1' veya '2' seçimi yapmadığı sürece orada kalır. Tuş takımından '1' seçimi, programın '1'in eşit olması için koşul ifadesini kontrol etmesini ve plastiği seçmesini sağlar ve benzer şekilde tuş takımından '2' seçimi, programın '2'nin eşit olması için koşul ifadesini kontrol etmesini ve sıcaklığı beslemesini sağlar. Yukarıdaki durumlardan herhangi birinde, program döngüyü keserek bir adım öne geçer ve daha önce yapılan seçime göre bir sonraki döngüye geçer.
Kullanıcı '1' girdiyse tekrar bir while döngüsüne girecek ve kullanıcı plastik seçimi için 0~9 arasında bir seçim yapana kadar orada kalacaktır. Plastiği seçtikten sonra, program plastik türünü ve ayarlanan sıcaklığı görüntüler ve kullanıcıdan koşullu if else ifadesi tarafından kontrol edilen '#' tuşuna basarak onaylamasını ister. Koşulun doğru olduğu bulunursa while döngüsü bozulur ve süreç kontrol döngüsüne girer ve sonuna kadar orada kalır.
Benzer şekilde '2' seçeneği için de program bir while döngüsüne girer ve geçerli bir giriş girilene kadar orada kalır ve bu durumda sıcaklık 350 o C'den düşüktür. Kullanıcı '*' tuşuna basarsa önceki sıcaklık girişi değişkenden silinir ve 350 o C'den düşük olduğu sürece yeni bir sıcaklık girişi alınır. Bundan sonra program koşul kontrol moduna girer ve kullanıcı '#' tuşuna basarak sıcaklığı onaylayana kadar bekler. '#' tuşuna basıldığında döngü bozulur ve program işlem kontrol döngüsüne girer ve birisi Arduino kartındaki ana sıfırlama düğmesine basana kadar orada kalır.
Proses kontrol döngüsünde, program sürekli olarak sıcaklığı izleyen bir döngüde kalır ve bu sıcaklık AD 595 (termokupl amplifikatörü) tarafından Arduino'nun ADC girişine beslenir. Arduino bu analog değeri dijital eşdeğere dönüştürür ve bu da uygun bir faktörün çarpımı ile Celsius ölçeğine dönüştürülür. Sıcaklığı okuduktan sonra, Arduino koşullu ifade karşılaştırma moduna geçer ve sonraki bölümde açıklanan çeşitli çalışma koşullarını karşılaştırır ve buna dayanarak ısıtıcının gücünü kontrol eder. Isıtıcı gücünü kontrol etmek için kısmi PWM modu kullanılır, ancak DC motor sadece Arduino tarafından açık/kapalı olarak kontrol edilir ve motorun hızı doğrusal regülatör tarafından kontrol edilir ve değeri manuel olarak kontrol edilen potansiyometrenin direncine göre değişir. Potansiyometrenin değerini değiştirerek, çıkış voltajı değişir ve DC motora karşılık gelen güç de değişir. Makara, başka bir Arduino kartı tarafından kontrol edilen ve RecycleBot proses kontrolünü barındıran Arduino Mega ile senkronize edilen basit bir değişken hızlı adım motoru sürücüsüdür. DC besleme motoru açık/kapalı olduğunda, adım motoru da aynısını yapar, tek fark farklı bir Arduino tarafından kontrol edilmesidir. İşlem kontrolündeki bu adım sonsuza kadar tekrarlanır ve namlunun sıcaklığını ayarlanan sıcaklık aralığında tutmak için programlanır, bu da ayarlanan değerlerin 15 o C üstünde ve altında olmasıdır. Bazen sistem sıcaklığının ayarlanan sıcaklığı aşması olabilir, ancak bu durumda program namlu sıcaklığının çalışma koşullarına bağlı olarak kısa bir sürede aralık içine düşecek şekilde kendini ayarlayacaktır.
Nasıl Monte Edilir (Elektrik Bileşenleri)
PCB'leri bir önceki bölümdeki devre şemalarına göre bağlayın.
Devre tamamlandıktan sonra daha iyi güvenlik için muhafaza edilmesi gerekir (özellikle DC motor kontrolörü ve AC güç kontrolü). Prototipimizde kullanılan düşük maliyetli bir çözüm, atılmış bir bilgisayar ATX SMPS güç kaynağıydı.
- Öncelikle güç kaynağını sökün ve güç kaynağı PCB'sini içeriden çıkarın.
- Şimdi eğer montaj amaçlı yoksa ısıtıcı kontrol PCB'sine 4 adet delik açın ve ayrıca PCB üzerindeki montaj delikleriyle düzgün bir şekilde hizalayarak ATX güç kaynağı metal kasasının alt tarafına da 4 adet delik açın.
- Daha sonra PCB'yi kabine monte edin, SMPS güç kaynağının egzoz fanını PCB'de fan için verilen konektörle bağlayın veya sadece doğru polariteye sahip kabloları verilen +12V güç konektörüyle bağlayın. Egzoz fanı MOSFET'i ve doğrusal voltaj regülatörünü soğutmaya ve sıcaklığı çalışabilir sıcaklık aralığının altında tutmaya yardımcı olur.
- Daha sonra kabinin üst yüzeyine DC motorun hız kontrol potansiyometresini yerleştirmek ve monte etmek için bir delik açın.
- Triyak'ı aşağıdaki resim galerisinde gösterildiği gibi monte edin.
- ATX güç kaynağındaki dairesel açıklıktan giriş ve çıkış kablolarını çıkarın ve bunları ısıtıcı, motor, AC güç soketi vb. gibi ilgili elemanlara bağlayın.
- Termokupl, aşağıdaki şekilde görüldüğü gibi, ısıtıcı namlu flanşı ile ekstrüzyon kalıbı arasına, arka plan buharlarından ve elektriksel gürültüden tamamen izole olacak şekilde, kapton bantla tamamen kapatılarak yerleştirilmelidir.
Devre birleştirildikten sonra, her şeyin tasarlandığı ve amaçlandığı gibi çalışıp çalışmadığını test etme zamanı gelir. Makara mekanizması, ekstrüde plastikten bir makara yapmak için adım motorunun üzerine yerleştirilecektir.

Atılan ATX güç kaynağı, SMPS PCB'si çıkarıldı ve tabanı Kapton bantla izole edildi.

Isıtıcı ve Motor kontrol PCB'si kabine monte edilmiştir. Egzoz fanı beslemeye bağlıdır.

Son montaj tamamlanır, üst tarafa motor hızını kontrol eden potansiyometre yerleştirilir.

Elektrik bağlantıları ve kontakları ile son montaj.

Elektrik bağlantıları ve kontakları ile son montaj.

Basit biriktirme mekanizması.







Temiz bir kaputta test edilmeye hazır son montaj
Yalıtım hakkında detaylar
Nasıl Monte Edilir (Mekanik Bileşenler)
Mekanik montaj talimatları ve parçaların çizimleri aşağıdaki bağlantıda bulunabilir. MOST'taki RecycleBots'un çeşitli versiyonlarının evriminde , temel mekanik parçaların aynı olduğu, elektrikli parçaların ise daha iyi performans için sürekli olarak güncellendiğiunutulmamalıdır .
Nasıl Test Edilir
RecycleBot'u test etmek ve kullanmak kolaydır. Tamamen monte edildikten sonra, güç fişini AC güç soketine bağlayın ve LCD'de bir karşılama mesajı almalısınız, hem sıcaklık sensörü kartındaki hem de Arduino Mega kartındaki güç LED'i devrede güç olduğunu belirterek yanmalıdır. Karşılama mesajından sonra ekstrüzyon için plastiği seçmeniz veya ekstrüzyon sıcaklığını beslemeniz istenecektir. Ekstrüzyon sıcaklığını seçtikten sonra, LCD'nin sistem sıcaklığını ve ayar sıcaklığını gösterdiğini göreceksiniz. RecycleBot aşağıda belirtilen mantığı izlemelidir.
- Sistem sıcaklığı ayarlanan sıcaklığın -15 o C altında ise ekstrüzyon başlamaz ve ısıtıcı tam güçte çalışır.
- Sistem sıcaklığı ayarlanan sıcaklığın - 15 o C üzerinde, ancak ayarlanan sıcaklığın altında ise, ekstrüzyon devam edecek ve ısıtıcı, giriş gücü sınır aralığındaki kontrollü sıcaklığa düşürülerek açık kalacaktır. Spooler da motorla birlikte başlar.
- Sistem sıcaklığı ayarlanan sıcaklığın üstünde ancak ayarlanan sıcaklığın + 15 o C altında ise, ekstrüzyon devam edecek ve ısıtıcı, sıcaklığı bağlı aralıkta tutmak için giriş gücü daha da azaltılıp kontrol edilerek açık kalacaktır. Spooler, motor döndüğü sürece filamenti sarmaya devam eder.
- Sistem sıcaklığı ayarlanan sıcaklığın + 15 o C üzerindeyse , ekstrüzyon devam edecek ve sıcaklığı bağlı aralıkta tutmak için ısıtıcı tamamen kesilecektir. Spooler, motor döndüğü sürece filamenti sarmaya devam eder.
RecycleBot yukarıda belirtilen algoritmadan farklı çalışıyorsa, sorun giderme işlemi yapılması gerekir. Genel olarak, kodun yukarıda belirtilen algoritmaya göre çalışmaması çok olası değildir çünkü yeterince test edilmiştir. Potansiyel hataların ana kaynakları arızalı sıcaklık sensörü, yanlış sıcaklık okuması, özellikle ısıtıcı güç kontrol cihazına ve DC motor kontrol cihazına gevşek bağlantılar olabilir.

Devreye enerji verildiğinde güç LED'i yanar.

Ekran açıldığında Hoş Geldiniz Ekranı 1 karşımıza çıkar.

Hoş geldiniz ekranından sonra Katkıda Bulunanlar ekranı görünür.

1. Seçenek ekranı gelir ve kullanıcının 1 veya 2'yi girmesi gerekir.

Önceki seçenekte 1'e basıldığında bu seçenek ekranı gelir, plastik türüne göre 0 ile 9 arasında herhangi bir tuşa basılması gerekir.

Kullanıcı plastik türünü seçtikten sonra, '#' tuşuna basarak seçimi onaylaması gerekmektedir.

Seçimi onayladıktan sonra işleme başlanır.

İşlem başladığı andan itibaren sistem sıcaklığı hızla artar.

İşlem başladığı andan itibaren sistem sıcaklığı hızla artmaya başlar.

Sistem sıcaklığı ekstrüzyon sıcaklık aralığına ulaşır ve ekstrüzyon başlar.

DC besleme motoru, sistem sıcaklığı ekstrüzyon sıcaklığı aralığına ulaştığında çalışmaya başlar.

Sistem sıcaklığı ekstrüzyon sıcaklığı aralığına ulaştığında makaralı sistem çalışmaya başlar.

geri dönüşüm ve ekstrüzyonda kullanılan parçalanmış plastik.

Bu seçenek ekranı, kullanıcı ekstrüzyon sıcaklığını manuel olarak girmek için ilk defa 2'ye bastığında görüntülenir.

kullanıcı sıcaklığı girer.

Arduino kullanıcıdan ekstrüzyon sıcaklığını doğrulamasını ister.

Kullanıcı maksimum sıcaklıktan daha yüksek bir sıcaklık giriyor.

Arduino, girilen sıcaklığın maksimum sıcaklıktan yüksek olması durumunda "taşma" hatası veriyor.
1. Seçenek ekranı gelir ve kullanıcının 1 veya 2'yi girmesi gerekir.

filament kalıptan çıkar ve artık makaraya sarılmaya hazırdır.



















Nasıl kullanılır
RecycleBot'u kullanma adımları
- Devreye güç akar akmaz, bir karşılama mesajı görüntülenir ve kontrolör kullanıcıdan ekstrüzyon için plastik türünü seçmesini veya sıcaklığı beslemesini ister. Plastiği seçmek istiyorsanız, 1 girin veya sıcaklığı beslemek istiyorsanız, tuş takımından 2'ye basın.
- Bir plastik seçmek istiyorsanız, o zaman 10 farklı plastik seçeneğiniz var, sadece plastik seçimine göre 0~9'a basın ve RecycleBot ekstrüzyon sıcaklığını otomatik olarak yükleyecektir. Seçim yapıldıktan sonra, Arduino sıcaklığı onaylamanızı isteyecektir, o noktada tuş takımından '#' tuşuna basın ve işlem başlayacaktır.
- Ekstrüzyon için sıcaklığı girmek istiyorsanız, tuş takımından girin, 350 o C'nin altında olduğundan emin olmanız gerekir, aksi takdirde kabul etmez ve bir taşma mesajı görünür ve kullanıcıdan sıcaklığı tekrar girmesi istenir. Herhangi bir noktada giriş sıcaklığını temizlemek isterseniz, sadece '*' düğmesine basın ve sıcaklığı tekrar girebilirsiniz. Giriş sıcaklığı 100 o C'nin altındaysa, sayıdan önce bir '0' da ekleyin. Arduino sıcaklığı yalnızca üç basamaklı olarak kabul edecektir, yani 50 o C girmek istiyorsanız, o zaman 050 girmeniz gerekir. Tekrar, sıcaklık girildikten sonra, Arduino sıcaklığı onaylamanızı isteyecektir, bu noktada tuş takımından '#' tuşuna basın ve işlem başlayacaktır.
- Şimdi filament kalıptan çıkana kadar beklemeniz gerekiyor, çıkarken bir burun pensesi alın ve yavaşça çekin ve makaraya yerleştirin. Makaranın hızı, bunun için verilen potansiyometre ile ayarlanabilir. Filamentin kalınlığı, sıcaklık ve makaranın hızı ile ayarlanabilir.



Sorun giderme
Termokupl temizliği ve bakımı
Sıcaklığın doğru ölçümü, tüm süreç için en önemli girdi kontrol parametresidir. Polimerlerin buharlaşması ve ekstrüzyon sırasında kılcal etki nedeniyle polimerin termokupla (kapton bantta) yapıştığı ve sıcaklığın doğru ölçümünü etkilediği bulunmuştur. Bu sorun, ön ekstrüzyon kalıbını söküp açarak ve ardından termokuplu çıkararak kolayca çözülebilir. Şimdi termokuplun üzerine yerleştirilen küçük kapton bant çıkarıldıktan sonra bir jiletle kolayca temizlenebilir. Bunu temizledikten sonra, tekrar termokuplun üzerine küçük bir kapton bant şeridi yerleştirin ve tüm termokuplu kaplayın ve ardından daha önce olduğu gibi namlu flanşı ile ekstrüzyon kalıbı arasına yerleştirin. Aynı filament kalitesini sağlamak için bu termokuplun temizlenmesi ve bakımı düzenli olarak yapılmalıdır.
Isıtma bölümünün ve Auger'ın sökülmesi
Bazen ısıtıcıyı sökmek ve ayrıca burguyu temizlemek için çıkarmak gerekir. Bu, özellikle biraz polimer kaldığında ve ısıtma namlusunda katılaşıp burguyu tıkadığında kolay değildir. Bu durumda, ucuza bulunabilen ve kalan polimeri eritmek ve buharlaştırmak için çok verimli bir şekilde kullanılabilen bant ısıtıcıların kullanılması önerilir. Bant ısıtıcılar çok yüksek bir sıcaklık yoğunluğuna sahiptir ve polimeri kolayca buharlaştırabilirler. Bir inçten daha büyük çapa ve 500 W'ın üzerinde ısıtma gücüne sahip herhangi bir bant ısıtıcı, amacı çözmek için yeterince iyi olmalıdır. Bant ısıtıcıyı namlu ekseni boyunca yavaşça yerleştirin ve hareket ettirin, böylece namlu ve besleme borusunu ısıtır. Kısa bir süre içinde polimeri buharlaştıracaktır. Kalan tüm polimer buharlaştıktan sonra, namlunun oda sıcaklığına soğumasını bekleyin ve ardından sistem sökülebilir ve burgu kolayca çıkarılabilir.
Ekstrüzyon sonrası Auger sıkıştığında ne yapılmalı?
Ekstrüzyon işleminin sonunda (RecycleBot kapatıldığında) burgu ve borunun ısıtma bölümünün içinde bazı polimer talaşlarının olması oldukça olasıdır ve bu, oda sıcaklığına ulaştığında katılaşmış olacaktır. Böyle bir durumda RecyclebBot tekrar çalıştırıldığında, Auger'ın dönmemesi ve parçalanmış plastiği hazne içinde ısıtma bölümüne doğru itmesi mümkün olabilir, peki ne yapmalı? Böyle bir durumda bu, aşağıda belirtilen durumlara göre yapılabilir:
- Durum 1: Bir sonraki ekstrüzyon çevriminde aynı polimer kullanılıyorsa - Bu durumda, önceki polimer ayarlanan sıcaklıkta otomatik olarak eriyecek ve ısıtma bölümü içindeki sıcaklık kalan polimerin erime sıcaklığına ulaştığında helezon kendi etrafında dönmeye başlayacaktır.
- Durum 2: Bir sonraki ekstrüzyon döngüsü daha yüksek erime sıcaklığına sahip farklı bir polimer kullanıyorsa -- Bu durumda, ısıtma bölümünün içindeki sıcaklık, kalan polimerin erime sıcaklığına ulaştığında önceki polimer eriyecek ve burgu da kendi etrafında dönmeye başlayacaktır, ancak, mevcut polimer ekstrüde edilip bir makaraya sarılmadan önce önceki polimerin çıkarılması gerekir. Bu, halihazırda kullanılan polimerin birkaç parçalanmış parçasının eklenmesiyle yapılabilir, bu önceki polimeri ekstrüderden dışarı itecektir, ancak içinde mevcut polimer de olacaktır, bu nedenle birkaç parçalanmış parça önceki polimeri çıkarmak için atık olarak gidecektir. Filamentin incelenmesine dayanarak değerlendirilebilen karışık polimerlerin yeterli ekstrüzyonundan sonra, filament önceki polimer kirliliğinden nispeten arındığında kesilebilir ve yeni filament makaraya yerleştirme için kullanılabilir.
- Durum 3: Bir sonraki ekstrüzyon döngüsü daha düşük erime sıcaklığına sahip farklı bir polimer kullanıyorsa - Bu durumda, durum 2'deki prosedür tekrarlanabilir, ancak önceki polimer iyi çıkmazsa, ekstrüzyon sıcaklığı maksimum bir sıcaklığa ayarlanabilir ve önceki polimerin dışarı çıkmasını sağlamak için halihazırda kullanılan polimer parçalanmış talaşları eklenebilir veya ısıtma bölümü yuvarlak bir törpü ile açılıp temizlenebilir. Bundan sonra, ısıtma bölümünü monte edin ve RecycleBot'u herhangi bir polimer beslemesi olmadan en yüksek sıcaklıkta çalıştırın, bu önceki polimeri eritecek ve buharlaştıracaktır.
Gelecekteki Çalışmalar - Bunu daha iyi hale getirmek
Daha az bileşen kullanın -- Karmaşıklığı azaltın -- Maliyeti düşürün
- Daha küçük yapın - mekanik taraf aşırı büyük - taban büyük ölçüde gereksiz
- Büyük bir iyileştirme, makara için ikinci mikrodenetleyiciyi kesmeyi içeriyor. Makara, Arduino Mega tarafından değil, başka bir Arduino (Uno) tarafından kontrol ediliyor. Hem Arduino Motor shield kütüphaneleri hem de LCD veya Tuş takımı, çeşitli işlemler ve komutlar için doğru zamanlama döngüsü oluşturmaktan sorumlu olan aynı "Zamanlayıcı kayıtlarından" bazılarını kullanıyor, bu nedenle her iki kütüphaneyi aynı anda kullandığımızda, birkaç saniye çalıştıktan sonra çöküyor. Mega'nın kendisinde bol miktarda pin kaldı. Yapabileceğimiz veya yapabileceğimiz şey, zamanlama döngüsünü Arduino Mega tarafından oluşturmak ve ardından adım motorunu bununla kontrol etmek. Bunu yapmanın daha ucuz bir yolu olurdu, ancak iki çipe ve dört güç transistörüne daha ihtiyacımız var, bu nedenle yeni bir ekleme için bir kod tasarlamak ve yazmak yerine hızlı seçeneği seçtik.
Bazı yararlı referanslar ve harici bağlantılar
- Reprap için Termokupl Sensörü
- Arduino Tuş Takımı Eğitimi
- Arduino Motor kalkanı
- Atık plastik ekstrüderi (Referans bölümüne ve Dış bağlantılara bakınız)
- Çok Basit geri dönüşümbotu
- Atık plastik ekstrüderi Literatür taraması
- Power Jack Motion: Profesyonel Hareket Kontrol Çözümleri