 Prototyp Recyclebota V5.0.
Prototyp Recyclebota V5.0.PROJEKT NIE W PEŁNI FUNKCJONALNY — użyj zamiast tego RepRapable Recyclebot: Wytłaczarka do druku 3D typu open source do konwersji plastiku na żarnik do drukowania 3D
 Prototyp Recyclebota V5.0.
Prototyp Recyclebota V5.0. Prototypowy interfejs użytkownika Recyclebot V5.0.
Prototypowy interfejs użytkownika Recyclebot V5.0. Prototyp wytłaczarki włókien Recyclebot v5.0.
Prototyp wytłaczarki włókien Recyclebot v5.0. Prototyp wytłaczarki włókien Recyclebot v5.0.
Prototyp wytłaczarki włókien Recyclebot v5.0. Prototyp dyszy wytłaczarki włókien Recyclebot v5.0.
Prototyp dyszy wytłaczarki włókien Recyclebot v5.0. Prototyp sekcji chłodzenia włókna Recyclebot v5.0.
Prototyp sekcji chłodzenia włókna Recyclebot v5.0. Prototyp ściągacza włókien Recyclebot v5.0.
Prototyp ściągacza włókien Recyclebot v5.0. Prototyp ściągacza włókien Recyclebot v5.0.
Prototyp ściągacza włókien Recyclebot v5.0. Prototyp nawijacza włókna Recycle v5.0.
Prototyp nawijacza włókna Recycle v5.0. Prototyp nawijacza włókien Recyclebot v5.0.
Prototyp nawijacza włókien Recyclebot v5.0.Wytłaczarka do drukarek 3D Recyclebot V5.0 jest opracowywana przez Open Source Hardware Enterprise firmy Michigan Tech. Obecnie wytłaczarka działa i może wytłaczać żarnik w trybie ręcznym, dlatego staramy się, aby na początku 2017 r. wypuszczono w pełni automatyczną wersję. W wersji automatycznej cała elektronika zostanie niezwykle uproszczona do typu plug and play, obejmującego Arduino Mega z dedykowany ekran, a całą pozostałą elektronikę podłączymy bezpośrednio do puszki z elektroniką - upraszczając w ten sposób konstrukcję i redukując koszty. Interfejsem użytkownika będzie klikalny enkoder obrotowy z wyświetlaczem LCD 20x4. Po opracowaniu pozostałej pożądanej funkcjonalności projekt i konstrukcja zostaną uproszczone. Ta ostateczna wersja wytłaczarki będzie nosiła nazwę Recyclebot V5.1. To urządzenie zostało opracowane tak, aby było w pełni funkcjonalne z granulowanego tworzywa sztucznego pochodzącego z recyklingu, za pomocą nowej wersji granulatora tworzyw sztucznych , opracowanej przez MTU OSHE, której premiera planowana jest na wiosnę 2017 roku.
Wszystkie wydrukowane pliki stl i kod Arduino można znaleźć na GitHubie tutaj .
Zawartość
Poprzednie badania
Główną motywacją do zmian i projektowania naszych wytłaczarek jest fakt, że właściwości materiałowe plastiku pochodzącego z recyklingu bardzo różnią się od granulatu surowego plastiku. Chcieliśmy mieć większą kontrolę nad szybkością wytłaczania włókien, szybkością wciągania i nawijania oraz wydajnością, co doprowadziłoby do powstania maszyny samodopasowującej się w oparciu o charakterystykę włókna (która różni się od poprzednich technologii recyklingu robotów). Układ maszyny jest luźno oparty na projektach wytłaczarek przemysłowych, posiadających te same funkcjonalności, co poprzednie wersje Recyclebota. Zaprojektowaliśmy system w taki sposób, abyśmy mogli w różnym stopniu kontrolować każdy aspekt systemu, aby przetestować i opracować idealny system, który zostanie wydany jako Recyclebot V5.1. Oprócz tego podejmujemy kroki mające na celu zapewnienie łatwości obsługi w zakresie budowy systemu. Ogólny materiał i sterowanie systemu są podobne do drukarki 3D - patrz BOM poniżej.
W Internecie dostępnych jest wiele innych domowych wytłaczarek do drukarek 3D o otwartym kodzie źródłowym. Niektóre z nich obejmują:
- Lyman/Mulier – [1]
Ten projekt zawiera biblioteki używane do sterowania Arduino: Biblioteki Arduino
- Płynny kryształ
- AccelStepper
Cele projektu
Głównym celem tego projektu jest stworzenie solidnej, samokorygującej się wytłaczarki do włókien, która będzie mogła pracować z dowolnymi włóknami lub surowcami z recyklingu w systemie.
Oprócz tego w funkcjonalności projektowania znajdują się następujące cele:
- Cele obecnego projektu
- Utwórz odnowioną wersję Recyclebota, która obejmowałaby cały system, w tym wytłaczarkę, sekcję chłodzącą, wykrywanie i kontrolę średnicy, automatyczne nawijanie i tempo produkcji systemu.
- Kontrola nad funkcjonalnością poszczególnych elementów systemu oraz projektem interfejsu użytkownika.
- Znaczące obniżki ceny i wymagań dotyczących umiejętności konstrukcyjnych w porównaniu z poprzednimi wersjami Recyclebota.
- Bazowa reprezentacja funkcjonalności idealnego systemu. Teraz, gdy wszystkie elementy składowe są już gotowe, bardzo łatwo jest wprowadzić pożądane zmiany.
- Cele w Recyclebot V5.1
- W pełni automatyczne wytłaczanie włókien, w tym kontrola szybkości, średnicy i rodzaju tworzywa sztucznego.
- Sekcja chłodzenia kąpielą wodną (jeśli to konieczne, aby uzyskać wysoką wydajność produkcyjną i precyzyjną kontrolę średnicy).
- Łatwość użycia w budownictwie. Dobrze udokumentowane wskazówki, które każdy może zastosować, aby zbudować i obsługiwać nasz system.
- Rentowny model biznesowy zarówno w przypadku sprzedaży systemów wytłaczania, jak i żarników do drukarek.
Projekt
Projekt można podzielić na 5 odrębnych funkcji.
- Wytłaczarka
- Sekcja Chłodnicza
- Ściągacz do włókien
- Nawijarka włókien
- Kontrola
Wszystkie wydrukowane pliki stl i kod Arduino można znaleźć na GitHubie tutaj .
Wytłaczarka
The current design features 3 stepper motors. The extruder itself features a NEMA 23 stepper motor, with a 1:15 gearbox. This motor is then coupled to a drill bit via a 3d printed coupler. Surrounding the drill bit is a printed hopper, designed to hold extruder feed stock.
As you move down the drill bit, you will see that it enters a pipe with nichrome wire wrapped around it. Also attached to the pipe is a thermistor that is used to measure the extruder temperature. This barrel assembly can be wrapped in insulation, as seen in the figures aside. At the end of the pipe, there is a nozzle with a drilled hole in the middle. This extruder assembly is attached to a base to keep all items steady.
Cooling Section
Currently, the cooling section is comprised of 5x50mm CPU fans arranged in such a way to maximize airflow around filament, see figures aside. This fan assembly is attached to the board via a magnetic mounting system. This system has a base that is adhered to the board, with magnets both in the mounting plates and the fan assembly. This system has been designed to feature a modular effect with switching cooling unit assemblies, particular the water bath assembly that will be released in Recyclebot v5.1.
Filament Puller Section
To adjust the filament diameter, you must adjust the extrusion rate from the extruder. In our model, we make that adjustment by manually pulling the filament with a stepper motor controlled, dual compressed axies with urethane rollers, and a printed structure and belt system. To perform this, the stepper motor driver must have a high level of microstepping to ensure that the filament has a consistent diameter. This motor can be controlled by the user interface, along with all other main functionalities of the system.
Filament Winder Section
The final step of the process includes winding the filament onto a spool. What we found was that if the motor has a significant amount of power, the filament would be pulled from the puller assembly, and diameter control was unobtainable. To fix this issue, we have lowered the current from the driver to the motor to <0.4A. This allowed the winder to spin and wind filament, but not with such force that the diameter is affected.
Control
All items are controlled within two breadboards and arduino pins. To see the pinout, please reference the arduino code on GitHub here.
BOM
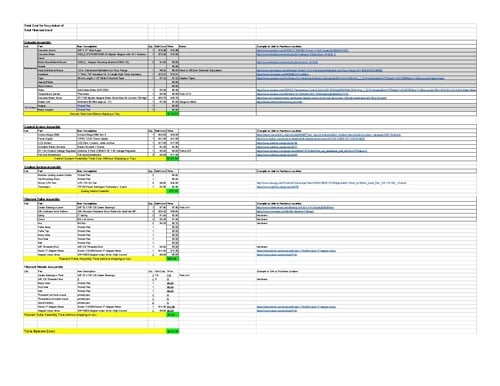
Current
Discussion
This version of the Recyclebot is currently under heavy testing and continuous development. If you expect a version with all bugs hammered out, wait for Recyclebot v5.1, due for release Spring 2017. All printed files and code is located on GitHub here.
Some future improvement ideas includes constant diameter monitor and adjustments, and a comprehensive filament winding guide system.
Conclusions
Przedsiębiorstwo Open Source Hardware będzie kontynuować rozwój Recyclebot v5. Spodziewaj się dopracowanej wersji wydanej wiosną 2017 r. Obecna wersja to przybliżony prototyp i weryfikacja koncepcji.