 Prototipo Recyclebot V5.0.
Prototipo Recyclebot V5.0.DISEÑO NO TOTALMENTE FUNCIONAL : use en su lugar RepRapable Recyclebot: extrusora imprimible en 3D de código abierto para convertir plástico en filamento de impresión 3D
 Prototipo Recyclebot V5.0.
Prototipo Recyclebot V5.0. Interfaz de usuario prototipo de Recyclebot V5.0.
Interfaz de usuario prototipo de Recyclebot V5.0. Prototipo de extrusor de filamentos Recyclebot v5.0.
Prototipo de extrusor de filamentos Recyclebot v5.0. Prototipo de extrusor de filamentos Recyclebot v5.0.
Prototipo de extrusor de filamentos Recyclebot v5.0. Prototipo de boquilla extrusora de filamentos Recyclebot v5.0.
Prototipo de boquilla extrusora de filamentos Recyclebot v5.0. Prototipo de sección de enfriamiento de filamentos Recyclebot v5.0.
Prototipo de sección de enfriamiento de filamentos Recyclebot v5.0. Prototipo de extractor de filamentos Recyclebot v5.0.
Prototipo de extractor de filamentos Recyclebot v5.0. Prototipo de extractor de filamentos Recyclebot v5.0.
Prototipo de extractor de filamentos Recyclebot v5.0. Prototipo de bobinadora de filamentos Recycle v5.0.
Prototipo de bobinadora de filamentos Recycle v5.0. Prototipo de bobinadora de filamentos Recyclebot v5.0.
Prototipo de bobinadora de filamentos Recyclebot v5.0.La extrusora de filamentos para impresora 3D Recyclebot V5.0 está siendo desarrollada por Open Source Hardware Enterprise de Michigan Tech. Actualmente, el extrusor funciona y puede extruir filamento en modo manual, por lo que nos esforzamos por lanzar una versión completamente automática a principios de 2017. Dentro de la versión automática, toda la electrónica se simplificará extremadamente a un tipo plug and play que incorpora un Arduino Mega con El escudo dedicado y todos los demás componentes electrónicos se conectarán directamente a una caja electrónica, simplificando así la construcción y reduciendo los costos. La interfaz de usuario será un codificador rotatorio en el que se puede hacer clic, con una pantalla LCD de 20x4. Una vez desarrollado el resto de la funcionalidad deseada, se simplificará el diseño y la construcción. Esta versión final del extrusor se titulará Recyclebot V5.1. Este equipo fue desarrollado para ser completamente funcional con plástico reciclado granulado por la nueva versión del granulador de plástico , desarrollado por MTU OSHE, cuyo lanzamiento está previsto para la primavera de 2017.
Todos los archivos stl impresos y el código arduino se pueden encontrar en GitHub aquí .
Contenido
Investigación previa
La principal motivación para nuestros cambios y diseño de nuestra extrusora gira en torno al hecho de que las características del material del plástico reciclado son muy diferentes de las de los pellets de plástico crudo. Queríamos tener un mayor control sobre las tasas de extrusión de filamentos, las tasas y la capacidad de extracción y bobinado, lo que nos llevó a una máquina autoajustable basada en las características del filamento (que difiere de las tecnologías anteriores de recyclebot). El diseño de la máquina se basa libremente en diseños de extrusoras industriales y posee las mismas funcionalidades, junto con las versiones anteriores de Recyclebot. Hemos diseñado el sistema de manera que podamos controlar todos los aspectos del sistema en distintos grados, para probar y desarrollar el sistema ideal que se lanzará como Recyclebot V5.1. Además de esto, estamos tomando medidas para garantizar la facilidad de uso en lo que respecta a la construcción del sistema. El material general y el control del sistema son similares a los de una impresora 3D; consulte la lista de materiales a continuación.
Hay muchos otros extrusores de filamentos para impresoras 3D de código abierto de estilo doméstico disponibles en línea. Algunos de los cuales incluyen:
- Lyman/Mulier - [1]
Este diseño incluye las bibliotecas utilizadas para el control de arduino: Bibliotecas Arduino
- Cristal liquido
- Accel paso a paso
Objetivos del proyecto
El objetivo principal de este proyecto es poder fabricar una extrusora de filamentos autocorrectora y robusta que se pueda utilizar para trabajar con cualquier filamento o materia prima de tipo plástico reciclado en el sistema.
Además de esto, estos son los siguientes objetivos colocados en la funcionalidad de diseño:
- Objetivos en el diseño actual.
- Cree una versión renovada de Recyclebot que encapsule todo el sistema, incluido el extrusor, la sección de enfriamiento, la detección y el control del diámetro, el bobinado automático y las tasas de fabricación del sistema.
- Control sobre la funcionalidad de los componentes individuales del sistema y el diseño de la interfaz de usuario.
- Reducciones significativas de precios y requisitos de habilidades para la construcción en comparación con versiones anteriores de Recyclebot.
- Una representación básica de la funcionalidad del sistema ideal. Es muy fácil realizar los cambios que nos gustaría, ahora que todos los componentes básicos están completos.
- Metas en Recyclebot V5.1
- Extrusión de filamentos totalmente automática, que incluye control de velocidad, diámetro y tipo de plástico.
- Sección de enfriamiento en baño de agua (si es necesario, para obtener altos índices de fabricación y un control preciso del diámetro).
- Facilidad de uso para la construcción. Instrucciones bien documentadas que cualquiera podría seguir para construir y operar nuestro sistema.
- Un modelo de negocio rentable tanto para la venta de sistemas de extrusión como de filamentos para impresoras.
Diseño
El diseño se puede dividir en 5 funciones distintas.
- extrusora
- Sección de enfriamiento
- Extractor de filamentos
- Bobinadora de filamentos
- Control
Todos los archivos stl impresos y el código arduino se pueden encontrar en GitHub aquí .
extrusora
The current design features 3 stepper motors. The extruder itself features a NEMA 23 stepper motor, with a 1:15 gearbox. This motor is then coupled to a drill bit via a 3d printed coupler. Surrounding the drill bit is a printed hopper, designed to hold extruder feed stock.
As you move down the drill bit, you will see that it enters a pipe with nichrome wire wrapped around it. Also attached to the pipe is a thermistor that is used to measure the extruder temperature. This barrel assembly can be wrapped in insulation, as seen in the figures aside. At the end of the pipe, there is a nozzle with a drilled hole in the middle. This extruder assembly is attached to a base to keep all items steady.
Cooling Section
Currently, the cooling section is comprised of 5x50mm CPU fans arranged in such a way to maximize airflow around filament, see figures aside. This fan assembly is attached to the board via a magnetic mounting system. This system has a base that is adhered to the board, with magnets both in the mounting plates and the fan assembly. This system has been designed to feature a modular effect with switching cooling unit assemblies, particular the water bath assembly that will be released in Recyclebot v5.1.
Filament Puller Section
To adjust the filament diameter, you must adjust the extrusion rate from the extruder. In our model, we make that adjustment by manually pulling the filament with a stepper motor controlled, dual compressed axies with urethane rollers, and a printed structure and belt system. To perform this, the stepper motor driver must have a high level of microstepping to ensure that the filament has a consistent diameter. This motor can be controlled by the user interface, along with all other main functionalities of the system.
Filament Winder Section
The final step of the process includes winding the filament onto a spool. What we found was that if the motor has a significant amount of power, the filament would be pulled from the puller assembly, and diameter control was unobtainable. To fix this issue, we have lowered the current from the driver to the motor to <0.4A. This allowed the winder to spin and wind filament, but not with such force that the diameter is affected.
Control
All items are controlled within two breadboards and arduino pins. To see the pinout, please reference the arduino code on GitHub here.
BOM
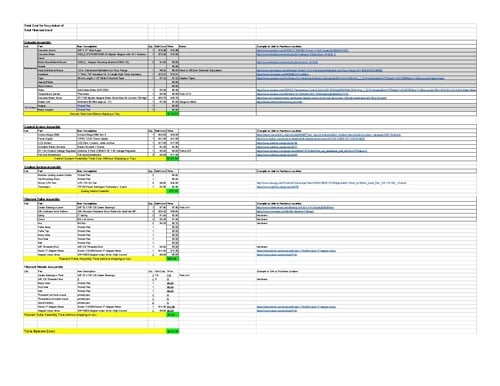
Current
Discussion
This version of the Recyclebot is currently under heavy testing and continuous development. If you expect a version with all bugs hammered out, wait for Recyclebot v5.1, due for release Spring 2017. All printed files and code is located on GitHub here.
Some future improvement ideas includes constant diameter monitor and adjustments, and a comprehensive filament winding guide system.
Conclusions
Open Source Hardware Enterprise continuará el desarrollo de Recyclebot v5. Espere una versión pulida lanzada en la primavera de 2017. La versión actual es un prototipo aproximado y una prueba de concepto.