

דף זה מתאר את מכבש החוטים המופעל באמצעות DC שתוכנן על ידי MOST.
שימו לב כי כיול (מתואר להלן) דורש מערכת GNU/Linux וידע מתקדם סביר בחומר ותוכנה. בפרט, עליך לדעת כיצד לערוך תוכנית, כיצד להרכיב תוכנית עבור מיקרו-בקר AVR עצמאי וכיצד להעלות את התוכנית למיקרו-בקר. הדף הזה מסביר בקצרה איך לעשות את הדברים האלה, אבל ההסברים לא מכוונים למתחילים.
תוכן
אספת מועצת בקרה
שטר חומרים
- לוח מעגלים מודפס של בקר (1)
- ATMega 328p, 32-TQFP (1 - cpu1)
- נגד 100k smd, 0805 (3 - R1, R2, R3)
- נגד 4.7k smd, 1206 (1 - R4)
- גביש 16MHz, HC49/SD (1 - Y1)
- MOSFET, IRLR2905PBFCT, TO-252, 2 פינים (3 - Q1, Q2, Q3)
- קבל 22pF smd, 0805 (2 - C1, C2)
- מכסה אלקטרוליטי 10mF smd, 3x5.3 (1 - C3)
- דיודה 5V 1A smd, DO-214AC (3 - D1, D2, D3)
- שני מסופי בורג עמודים, גובה 0.2 אינץ' (3 - P8, P10, P13)
- ספק כוח DC-DC, 7-28V (1, PSU1)
- 2x3 0.1 אינץ' כותרת פינים (2 - P14, P15)
- כותרת סיכה 2x3 מכוסה 0.1 אינץ' (1 - P12)
- 1x2 כותרות סיכות 0.1 אינץ' (6)
- 1x3 כותרות סיכות 0.1 אינץ' (2)
- כותרות סיכות 1x4 0.1 אינץ' (3)
- פין 1 אופציונלי לגישה לפינים 11, 19 ו-26 של ATMega
הַרכָּבָה
לוח הבקרה דורש הלחמה זהירה. באופן אידיאלי, יש להשתמש בתנור זרימה חוזרת (ניתן להשתמש בטוסטר אובן אם ננקטים טיפול נאות). מכיוון שרבים מהרכיבים הם על פני השטח, הלחמה ידנית היא מאתגרת. להלן הנחה שההלחמה תוזרם מחדש.
- הגדר את מתח המוצא של ספק הכוח DC-DC ל-5V. זה חייב להיעשות לפני הלחמת ספק הכוח DC-DC ללוח הבקרה. ניסיון להגדיר את המתח לאחר הלחמה במקום יהרוס את ATMega AVR.
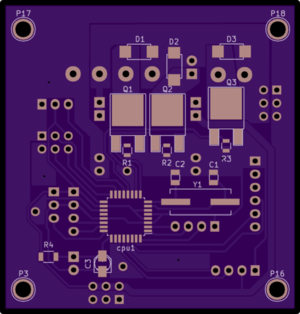 חזית לוח הבקרה
חזית לוח הבקרה 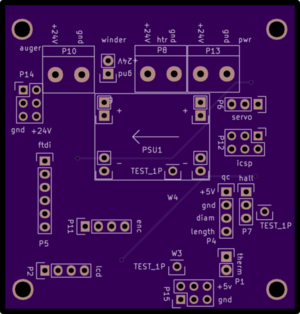 גב לוח הבקרהשימו לב שרכיבים יולחמו הן בחלק האחורי והן בחזית הלוח.
גב לוח הבקרהשימו לב שרכיבים יולחמו הן בחלק האחורי והן בחזית הלוח.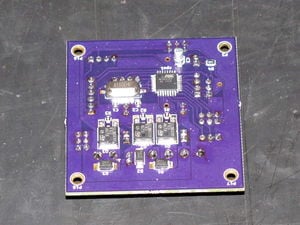 חזית עם רכיבי SMD מולחמים במקומם.אכלס את כל רכיבי ה-SMD בחזית הלוח עם משחת הלחמה והזרום מחדש את ההלחמה.
חזית עם רכיבי SMD מולחמים במקומם.אכלס את כל רכיבי ה-SMD בחזית הלוח עם משחת הלחמה והזרום מחדש את ההלחמה.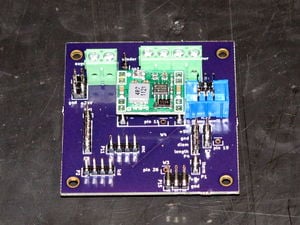 חזרה עם רכיבים מאוכלסים.אכלס את החלק האחורי של הלוח ברכיבים דרך חור.
חזרה עם רכיבים מאוכלסים.אכלס את החלק האחורי של הלוח ברכיבים דרך חור.- בנה והבזק את הקושחה של הבקר ( כאן ).
- הרכיבו את הלוח על מסגרת האקסטרודר (עדיין לא תוכנן לוח הרכבה).
- חבר את הרכיבים השונים לפינים המסומנים שלהם בלוח הבקר (מסך LCD, מקודד, מחמם וכו')
- כאשר לוח החיישנים מותקן, כבל התקשורת שלו יתחבר לכותרת ה-icsp בלוח הבקר.




לוח חיישן
שטר חומרים
- לוח מעגלים מודפס חיישן (1)
- AMS-Taos TSL1406R מערך חיישנים לינאריים (1)
- Atmel ATTINY45-20SU SOIC 8 פינים (1)
- נגד SMD 133-150 אוהם, 1206 (1)
- כותרת סיכה מכוסה 2x3 (1)
- כותרת 1 x 2 פינים (1)
- חוט נחושת מוצק 28-30 AWG (לחיישן TSL)
- LED אדום 3 מ"מ וכבל תיקון עם בית פינ נקבה 1x2
- אורך 1 מטר של כבל סרט עם שישה מוליכים עם מארזי מפתח
- בורג M2 x 12 מ"מ (2)
- מכונת כביסה M2 (2)
הַרכָּבָה
לחיישן יש רפידות וחורים שקטנים יותר מכותרות פינים טיפוסיות בגובה 0.1 אינץ' (2.54 מ"מ) אל תנסה להשתמש בכותרת סיכה רגילה ולקדוח את החיישן; הן עולות 30 דולר.
 הלחמת רכיבי SMD בחזית לוח החיישנים.הנח את רכיבי ה-SMD והזרם מחדש. הלחמו את כותרות הסיכות 2x3 ו- 1x2 לקדמת הלוח.
הלחמת רכיבי SMD בחזית לוח החיישנים.הנח את רכיבי ה-SMD והזרם מחדש. הלחמו את כותרות הסיכות 2x3 ו- 1x2 לקדמת הלוח. הלחמה מערך ליניארי ללוח.הלחמו חתיכות קצרות של חוטי נחושת בחלק האחורי של הלוח והלחמו את מערך החיישנים TSL1406R לחוטי הנחושת.
הלחמה מערך ליניארי ללוח.הלחמו חתיכות קצרות של חוטי נחושת בחלק האחורי של הלוח והלחמו את מערך החיישנים TSL1406R לחוטי הנחושת.- בנה והבזק את הקושחה לרסיבר של החיישן ( כאן ).
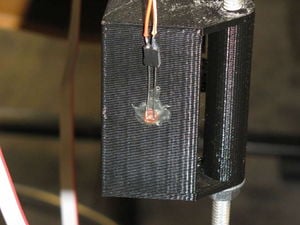 LED במעטה.התקן את ה-LED בתכריך עם אפוקסי.
LED במעטה.התקן את ה-LED בתכריך עם אפוקסי.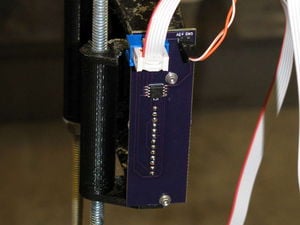 חיישן בתכריך.התקן את החיישן במעטפת המודפסת עם שני ברגים ודסקיות M3 x 12 מ"מ. חבר את ה-LED לראש 1x2 פינים וחבר את כבל סרט 6 המוליכים לראש 2x3 פינים מכוסה. חבר את הקצה השני של כבל הסרט לכותרת ה-icsp בלוח הבקר.
חיישן בתכריך.התקן את החיישן במעטפת המודפסת עם שני ברגים ודסקיות M3 x 12 מ"מ. חבר את ה-LED לראש 1x2 פינים וחבר את כבל סרט 6 המוליכים לראש 2x3 פינים מכוסה. חבר את הקצה השני של כבל הסרט לכותרת ה-icsp בלוח הבקר.




כיצד לכייל את מכבש נימה DC
זה דורש מערכת GNU/Linux וידע מתקדם סביר בחומר ותוכנה. בפרט, עליך לדעת כיצד לערוך תוכנית, כיצד להרכיב תוכנית עבור מיקרו-בקר AVR עצמאי וכיצד להעלות את התוכנית למיקרו-בקר. הדף הזה מסביר בקצרה איך לעשות את הדברים האלה, אבל ההסברים לא מכוונים למתחילים.
סקירה כללית של השלבים
- קבלת תלות
- בניית קושחה לניפוי באגים.
- העלה קושחת ניפוי באגים ללוח החיישנים.
- העלה קושחת ניטור ל-Arduino.
- בדוק את פלט החיישן.
- התאם את קושחת ניפוי הבאגים וחזור עד שהפלט משביע רצון.
- העלה קושחה רגילה מותאמת ללוח החיישנים.
- התאם את הקושחה וחזור עד שהפלט משביע רצון.
- העלה קושחת ייצור ללוח החיישנים.
- בנה קושחת הלוח הראשי והעלה אותה ללוח הראשי.
כיצד פועלים השלבים הללו
להלן מידע על אופן הפעולה של השלבים הללו.
קבלת תלות
תצטרך להשיג את הספרייה עבור תצוגת ה-LCD שלך ולשים אותה בספריות בתיקיית ספר הסקיצות שלך. תזדקק לספריות Arduino מה-GitHub שלנו ותכניס את זה לתיקיית ספר הסקיצות שלך. הנה קישור לספריות Arduino [1] . ייתכן שיהיה צורך לשרשר את הספרייה עבור התצוגה שלך, בהתאם למה שהיא עושה.
בניית קושחה
מאגר github מכיל את כל המקורות בספריית הקושחה. הקושחה של הלוח הראשי היא באקסטרודר, שכן החיישן נמצא בחיישן. הקוד בגרף החיישן מיועד ל-Arduino הניטור המשמש להצגת הנתונים הנמדדים על המסך.
אם כל הדרישות מותקנות, ניתן לבנות הכל באמצעות הפקודה make. (התקנת חבילת arduino-mk אמורה למשוך את כל מה שאתה צריך.) הקוד ב-extruder וגרף חיישנים אמור להיות ניתן לבנייה מהממשק של Arduino, אבל ייתכן שזה לא יעבוד.
העלאת קושחה
הקושחה מועלית באמצעות ICSP. אנו משתמשים ב-Beaglebone שמחבר את ארבעת הפינים הדיגיטליים שלו ואת הספק 3.3V למחבר ה-ICSP. נדרש קובץ תצורה avrdude כדי לגרום לזה לעבוד. כמו כן, לגרסת avrdude מ-Debian Jessie (וקודמתה יותר) יש באג שמונע ממנה לפעול. זה תוקן ב-Stretch. לדוגמא כיצד זה נעשה, ראה flash-bbb ו-avrdude.conf ב- https://github.com/mtu-most/franklin/tree/master/server/ .
בעת העלאת קושחה, יש להשתמש במחבר ICSP על הלוח המתוכנת. זוהי הכותרת העטופה בת 6 פינים. המפתח של הכותרת נמצא תמיד בצד של הכוח.
אנו משתמשים בחיבור usb כדי להתחבר לעצם הביגל כך שאם אינך משתמש בחיבור usb פקודות אלו לא יעבדו. אתה צריך להעביר את הקושחה מהמחשב לעצם הביגל עם הפקודה " scp build-uno/extruder.hex debian@192.168.7.2: " ולאחר מכן מעצם הביגל למכונה עם " sudo avrdude -C +avrdude.conf -c bbbmelzi -p atmega328p -U lfuse:w:0xe2:m ". פקודה זו לא תפעל אם אין לך את זה [2] ממאגר franklin. אתה יכול לשים את זה על עצם הביגל עם הפקודה הזו " scp avrdude.conf debian@192.168.7.2: ".
הפעלת תוכנית המוניטור
לשם כך, המחשב צריך להיותמותקן python-websocketd (מה שמצריך python-network ו-python-fhs מאותו מקום). הקושחה חייבת להיות מותקנת ב-arduino, וכבל חייב לחבר את כל הפינים בין כותרת ה-ICSP ב-Arduino לבין כותרת ה-ISCP בלוח החיישנים. לארדואינו אין כותרת עטופה; המפתח צריך להיות בצד החיצוני של הלוח. אם יש ספק, מדדו באילו פינים יש 5V עליהם.
סקריפט השרת צריך לקבל את הנתונים הסדרתיים מה- Arduino על הקלט הסטנדרטי שלו. זה אומר שצריך להגדיר תחילה את היציאה ולאחר מכן לתת אותה לשרת:
לאחר מכן השתמש בדפדפן כדי לעבור אל http://localhost:4567/ . אתה אמור לראות גרף של מדידת החיישן.
הפעלת תוכנית הריגול
בשלב השני, יש לנטר את הפלט של הקושחה הרגילה. זה נעשה עם תוכנית חיישני ריגול. הוא נטען על ארדואינו בדומה לתוכנית החיישן-גרף, והוא מוציא את הערך האחרון שהתקבל של החיישן ליציאה הטורית.
כדי להשתמש בו, פשוט הצג את הפלט של היציאה הטורית עם:
כאשר מעבירים פיסת חוט דרך החיישן, היא אמורה לשנות את ערכה.
מה לשנות
לקושחת ה-Senor יש שתי הגדרות המוגדרות ליד החלק העליון שיש לשנות בהתאם למבנה שלך. הם נקראים SKIP ו-DELAY. הפלט מהחיישן צריך להיות אופקי בערך. ברוב החיישן זה כן, אבל ליד הקצוות הוא יורד לאפס. בגלל זה, הקצוות אינם בשימוש. SKIP מגדיר כמה פיקסלים מדלגים משני הצדדים. שים לב שמספר הפיקסלים הכולל הוא 768, והוא מודד כל 2^EACHBITS פיקסלים, כך שאם אתה רואה משהו קורה בפיקסל 20, ו-EACHBITS הוא 5, זה באמת פיקסל 20*32=640.
לניטור, ייתכן שתרצה להפחית את ה-EACHBITS. שימו לב שהמספר הכולל של פיקסלים שנמדדו לא יכול להיות גדול מ-255.
DELAY הוא זמן האינטגרציה, ביחידות שרירותיות. הגדר זאת כך שהאות יהיה גבוה ככל האפשר, אך לא יחשף יתר על המידה.
הפיקסל הנמוך ביותר משמש כמיקום הצל. אבל אם הערך שלו גבוה מ-VALID_LIMIT, הוא נמחק ולא נשלחת מדידה ללוח הראשי. אז ודא שהוא מעל הערך הזה בדרך כלל, והצל לוקח אותו מתחת לערך הזה.
כאשר זה נעשה, יש להעלות את הקושחה הרגילה. אבל בהתחלה, זה נעשה בשינוי אחד: השורה המגדירה SEND_MAX צריכה להיות ללא הערות. זה גורם לחיישן לשלוח את הערך המרבי של כל מדידה במקום את המיקום של הצל. יש להשתמש בתוכנת החיישן-ריגול כדי לבדוק אם DELAY טוב, ואם לא יש להתאים אותו.
ברגע שזה יהיה טוב, יש להעיר שוב את שורת ה-SEND_MAX ולהעלות את הגרסה הסופית של הקושחה. ניתן להשתמש שוב בחיישן-מרגל כדי לבדוק שהכל עובד כשורה.
scp firmware.hex debian@athena-11.local:
make make MONITOR_PORT=/dev/ttyACM0 BOARD_TAG=mega2560 upload sudo avrdude -C +avrdude.conf -c bbbmelzi -p attiny25 -U flash:w:firmware.hex:i stty -F /dev/ttyACM0 115200 raw