First you need to install the software on the Raspberry Pi. If you have previously done a manual install: remove /usr/local/sbin/pump-server and the line referencing it in /etc/rc.local from the Raspberry Pi.
On the Raspberry Pi, open /etc/apt/sources.list and add the line:
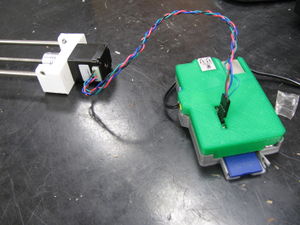
Motor plugged into raspberry pi. Plug the motor into the raspberry pi. If the motor is plugged in the wrong way the pump will push when it is told to pull, so then you will want to turn the plug around. NOTE: Do not plug and unplug the motor from the pi if the pi is plugged in to a power source.
Micro-USB plugged into raspberry pi. Using a micro-USB adaptor plug the raspberry pi into the computer.
Raspberry pi hooked up to router. Plug an ethernet cable into the raspberry pi, then connect it to the router. Then connect the router to the computer with another ethernet cable.
Plug everything into an outlet and turn on the router. Look to see that your computer recognizes the network. Once it does, switch over to that network and open up your web browser. Type in the address bar: https://pi.local:8888. NOTE: This is only the address if a version of GNU/Linux is in use (including when a keyboard and monitor are connected to the Pi itself). We have no practical way to get the address of the Pi from a computer running Windows or MacOS, however it does work on Windows and Mac if the name or IP can be obtained; this must be used instead of pi.local. Most routers have an administration web site which can list current clients. Consult your router manual for how to get this information.
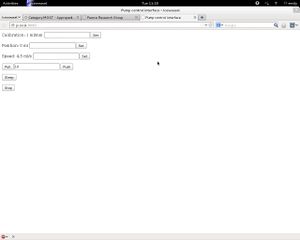
Raspberry pi hooked up to router.The site that is now opened is the pump control interface.
Set the Calibration to 1 ml/mm and set the speed to 1 ml/s.
Pull the syringe out slightly past a big marker. Then using tiny steps, push the syringe to the bigger marker so the plunger is exactly on the mark. (Because of backlash, you want to do the entire procedure with pushing only.)
Set the position to 0 ml.
Push it further until you reach another marker (larger distance is better). Make sure to do small steps at the end, in order to make sure you do it by pushing only.
Record the current position. The unit of this position is really mm, because a calibration value of 1 ml/mm was used.
Divide the number of milliliters between the markers by the number of millimeters you pushed it. This is the correct calibration value for this syringe.
You can insert default values, including a default calibration value, in /etc/default/pump-server. Look at /etc/init.d/pump-server (but don't edit it) to see which variables can be set.
Cookies help us deliver our services. By using our services, you agree to our use of cookies.